Abstract
Motion planners are essential for the safe operation of automated vehicles across various scenarios.
However, no motion planning algorithm has achieved perfection in the literature,
and improving its performance is often time-consuming and labor-intensive.
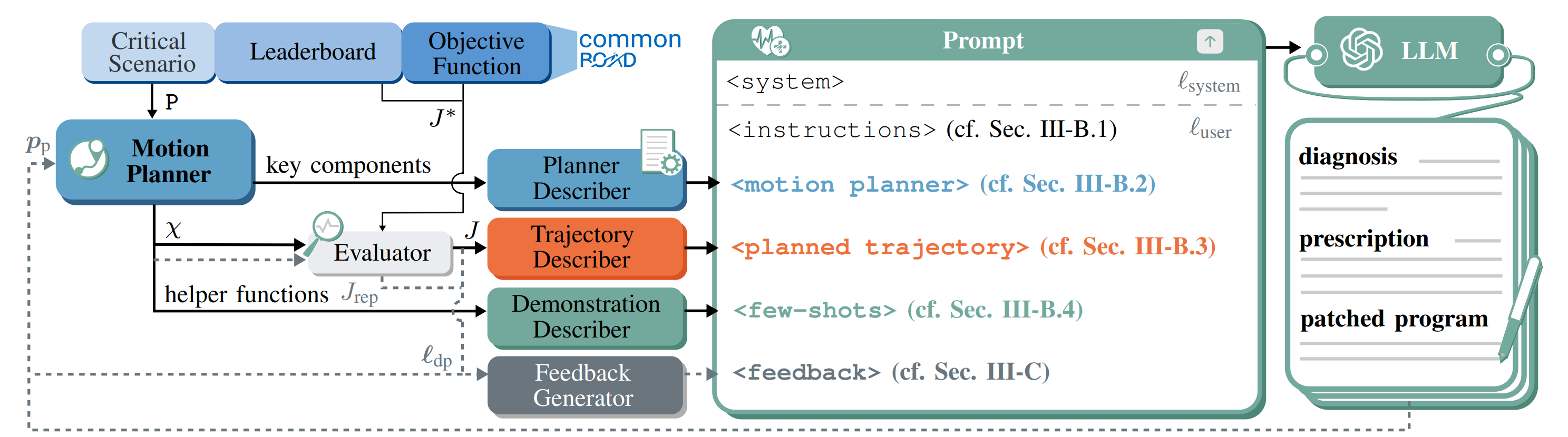
To tackle the aforementioned issues, we present DrPlanner,
the first framework designed to automatically diagnose and repair motion planners
using large language models. Initially, we generate a structured description of the planner and its planned
trajectories from both natural and programming languages.
Leveraging the profound capabilities of large language models, our framework returns repaired planners with
detailed diagnostic descriptions. Furthermore, our framework advances
iteratively with continuous feedback from the evaluation of the
repaired outcomes. Our approach is validated using both search-
and sampling-based motion planners for automated vehicles;
experimental results highlight the need for demonstrations in
the prompt and show the ability of our framework to effectively
identify and rectify elusive issues.
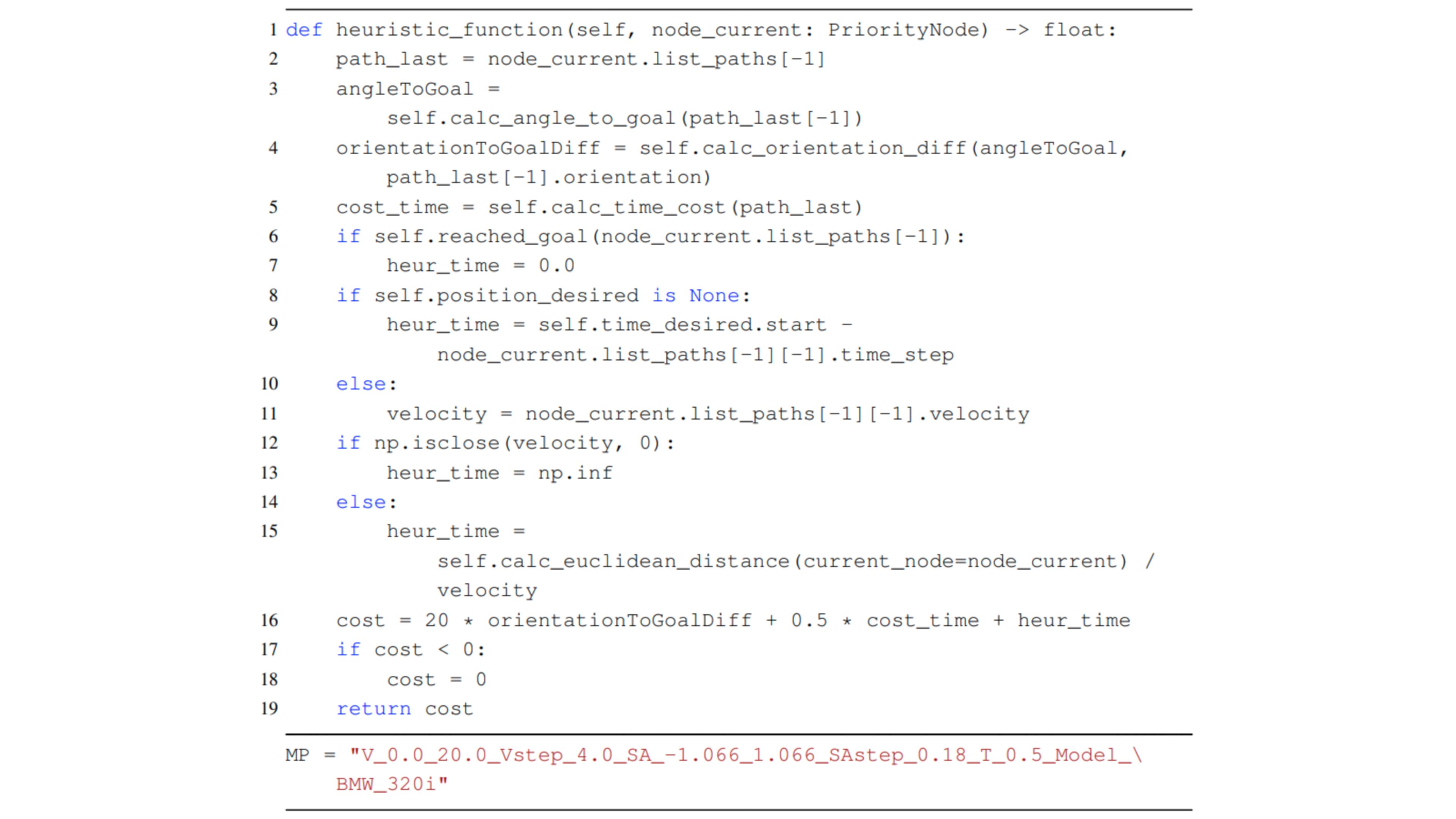
Initial planner.
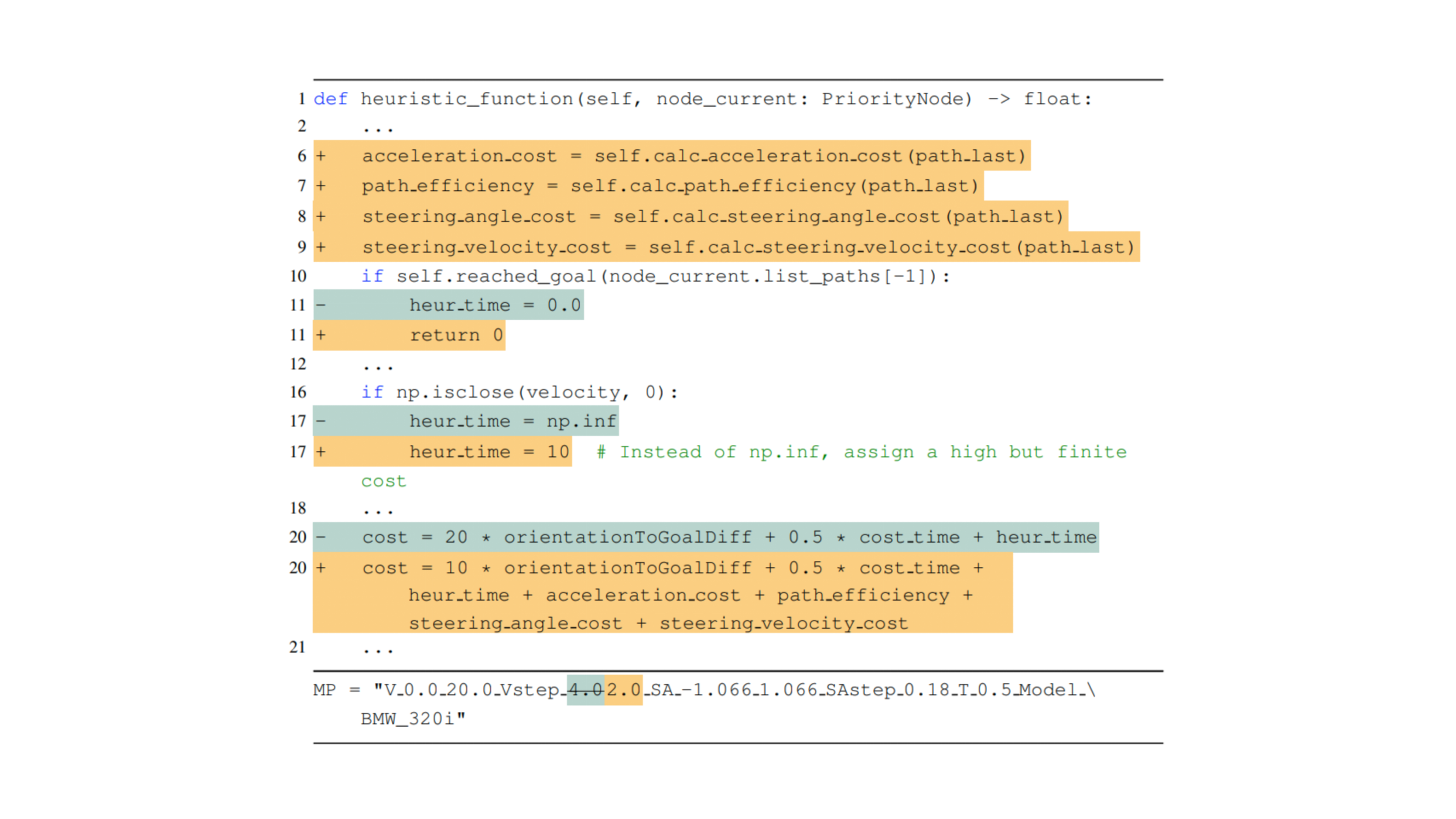
Repaired planner after first iteration.
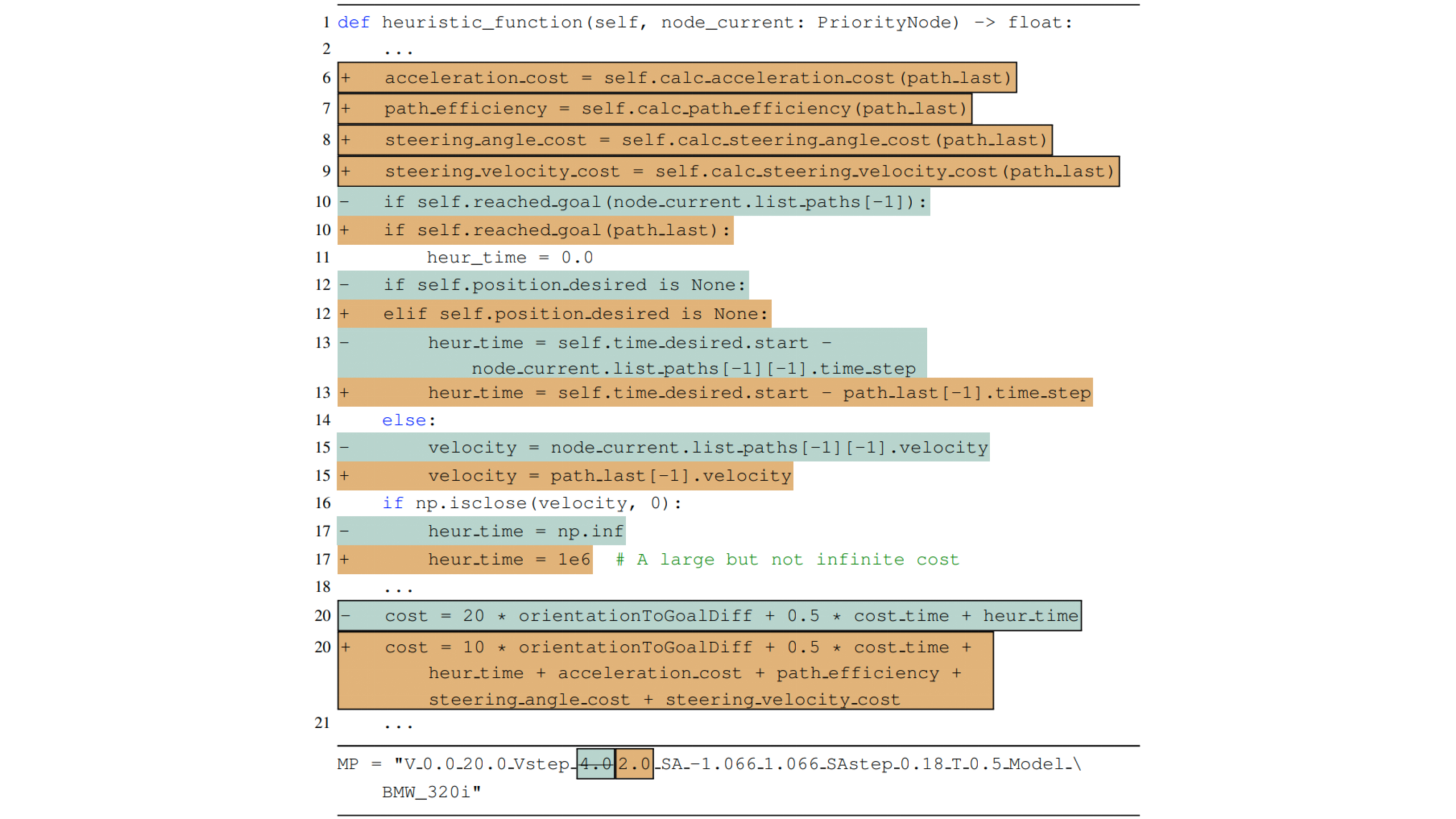
Repaired planner after third iteration.
Video Presentation
BibTeX
@article{DrPlanner,
title = {{DrPlanner}: Diagnosis and Repair of Motion Planners Using Large Language Models},
author = {Yuanfei Lin and Chenran Li and Mingyu Ding and Masayoshi Tomizuka and Wei Zhan and Matthias Althoff},
journal = {IEEE Robotics and Automation Letters},
year = {2024}}